Rotorkopf-Bauformen von Helikoptern

Hubschrauber-Konzepte
Die Entwicklung der bemannten Hubschrauber ist nicht stehen geblieben und es wurden verschiedene Denkansätze weiterverfolgt. So werden heute im bemannten Hubschrauberbereich neue Bauformen wie das NOTAR (NO TAil Rotor)-Konzept und das Tilt Rotor-Konzept weiterentwickelt. Ein Projekt namens X-Wing, bei welchem der Rotor im Flug stillgelegt und dann als "normaler" Flügel verwendet wird, wird vermutlich noch länger brauchen um zur Serienreife gelangen.
Verbreitete Bauformen
Die Bauform des Single-Rotor-Helikopters, mit nur einer Rotorebene, ist am weitesten verbreitet. Die Anzahl der Rotorblätter variiert jedoch zwischen 2 und 7. Weitere hier vorgestellte Formen sind seltener.
Im Modellsport und vor allem im Spielzeugbereich gibt es selbsterklärend ein breiteres Spektrum mit vielen Kombinationen. Der unten vorgestellte Quadrocopter gehört ebenso zu dieser Gruppe, wie z. Bsp. ein Chinook mit zwei Koaxrotoren usw.
Wer schon mal einen Kraftschrauber gesehen hat, der wird sich vorstellen können, dass mit der Entwicklung noch nicht Schluss ist. Ebenfalls wird ständig an der Energieeffizienz der Rotorblätter gearbeitet.
Single Rotor

Die am häufigsten vorzufindende Rotorkopf-Bauform ist der Single-Rotor, der nur eine Rotorkreisebene besitzt. Die Anzahl der Rotorblätter kann jedoch zwischen 2 und 7 variieren.

Die Bauform mit Tandemrotor findet man vorwiegend bei großen Hubschraubern - im Bild zu sehen ist ein Chinook. durch die gegenläufige Rotordrehung heben sich die Drehmomente der einzelnen Rotoren auf. Die Steuerung um die Hochachse im Schwebeflug erfolgt durch entgegengesetztes Neigen der Rotorebenen. Das erfordert eine sehr komplexe Steuerung. Ein solcher Heli kann sehr große Lasten transportieren.


Bei der Bauform mit zwei ineinander kämmenden Rotoren bewegen sich zwei gegenläufige eng zusammenstehende Rotoren mit etwas nach außen geneigten Rotorwellen ineinander kämmend. durch die gegenläufige Drehrichtung der Rotoren ist kein Heckrotor notwendig. Diese Bauform wurde schon früh entwickelt, geriet dann aber vorläufig etwas in Vergessenheit. Heute ist diese Bauform auch im Modellsportbereich anzutreffen, wenn auch selten.

Bei der koaxialen Rotoranordnung sind beide Rotoren übereinander liegend montiert und drehen sich gegenläufig. Die Steuerung um die Hochachse erfolgt durch unterschiedlich große Auftriebserzeugung der beiden "Rotoren". durch den großen Luftwiderstand der Rotorkonstruktion, können solche Hubschrauber keine großen Geschwindigkeit erreichen. Modell-Koaxialhelikopter zeigen ein äußerst stabiles Flugverhalten, sind daher nicht sonderlich agil und beweglich.

Beim Tragschrauber handelt es nicht um einen typischen Hubschrauber, denn die Energiequelle für den Auftrieb während des Fluges ist der am Heck befindliche Ventilator und nicht der große Hauptrotor. durch den Vorschub, den der Ventilator erzeugt, wird der Hauptrotor in Rotation versetzt und die Rotorblätter bekommen eine Tragflächenfunktion. Man könnte einen solchen Tragschrauber auch als Autorotationsheli mit Hilfsantrieb oder Flugzeug mit rotierenden Tragflächen bezeichnen.
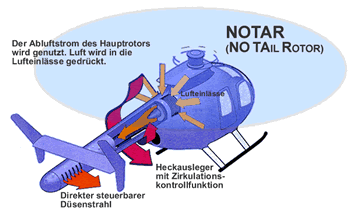
Beim NOTAR handelt es sich um einen Helikopter, mit einem Hauptrotor aber ohne Heckrotor. Dieses Verfahren wurde von McDonnell Douglas (MD-Helikopters) entwickelt und patentiert. Ein Teil des Hauptrotorabwindes wird in den Heckausleger geleitet und dort mit einem Gebläse weiter verdichtet. Die Luft strömt durch den Heckausleger und entweicht am Ende durch Düsen. Der Schub der Düsen kann durch den Piloten gesteuert werden. Dies erlaubt den Ausgleich des Drehmomentes vom Hauptrotor und die Drehung des Hubschraubers um die Hochachse, genau wie mit Heckrotor!

Ergänzend sei hier noch der Multicopter (Drohne) vorgestellt, der zunächst in der Spielzeugwelt Einzug hielt und heute für eine immer größer werdende Platte professioneller Einsatzzwecke Verwendung findet. Multicopter gibt es in verschiedenen Ausführungen. Angefangen beim Tricopter, über den im Bild dargestellten Quadrocopter mit 4 Rotoren, gibt es sie auch als Hexacopter mit 6 und Octocopter mit 8 Rotoren. Im Miniformat werden Multicopter gern für das sogenannte FPV-Fliegen (FPV-Racing) eingesetzt, wobei der Pilot ein Kamerabild aus der in der Front der Drohne eingebauten FPV-Kamera (First Person View = Pilotensicht) erhält, was ihm beim Fliegen den Eindruck verschafft, selbst im Fluggerät zu sitzen.
Das Bild zeigt einen Kite75 der Firma Vectorbirds airborne systems.