Gyro/ Kreisel am Modellhelikopter

Das Bild zeigt einen Kreisel. Solche Kreisel waren die Vorlage für die ersten mechanischen Kreiselsysteme, die später durch elektronische Systeme abgelöst wurden.
Drehmomentausgleich am Modellhelikopter
Der rotierende Hauptrotor eines Helikopters erzeugt ein Drehmoment. Das Drehmoment ist eine Kraft, welche den Körper des Helikopters unter dem rotierenden Hauptrotor in entgegengesetzter Drehrichtung drehen würde. Um das zu verhindern, muss das vom Hauptrotor erzeugte Drehmoment ausgeglichen werden. Dazu wird in der Regel ein Heckrotor verwendet, welcher wie ein Ventilator Luft in eine Richtung bläst und so eine Gegenkraft zum Drehmoment des Hauptrotors erzeugt. Auf andere Prinzipien zum Drehmomentausgleich soll hier nicht näher eingegangen werden.
Das Rotor-Drehmoment am Helikopter bleibt nicht konstant, sondern verändert sich durch verschiedenste Einflüsse wie Wind, Änderungen von Drehzahl und Blattanstellwinkel u.a. ständig. Um eine Drehung des Helikopters auf der Hochachse (Achse der Hauptrotorwelle) wirksam zu vermeiden, muss die vom Heckrotor erzeugte Gegenkraft stets genau so groß sein wie das vom Hauptrotor erzeugte Drehmoment. Auf diese Weise heben sich beide Kräfte gegenseitig auf und das Heck des Helikopters bleibt exakt in Position.
Um das zu erreichen, bedient man sich heute moderner Sensorik, die selbst geringste Drehbewegungen des Helikopters erkennt und über einen PID-Regelkreis die Schubkraft des Heckrotors kontinuierlich die Erfordernisse anpasst und so den Helikopter auf der Hochachse stabilisiert. Diese elektronischen Bauteile nennt man Heckkreisel, oder auch Gyroskope.
Ursprüngliche Kreisel stabilisierten nur auf einer Achse. Heute findet man Kreisel sehr oft in Form von 3-Achs-Kreiseln. Im Helikopter-Modellflug werden sie Flybarless-Systeme genannt. Sie stabilisieren einen Heli nicht nur auf einer Achse, sondern gleichzeitig auf 3 Achsen. Diese drei Achsen sind die Hochachse (Heck), Querachse (Nick) und die Längsachse (Roll). Die Funktionsweise ist jedoch die gleiche, wie die eines reinen Heckkreisels. Daher gelten für die Einstellung von Heckkreiseln in FBL-Systemen die gleichen Regeln, wie für die Einstellung von reinen Heckkreiseln.
In den Zeiten der Anfänge der Modellhelikopter im letzten Jahrhundert war der Begriff Kreisel noch ein Fremdwort im Zusammenhang mit der Stabilisierung des Hecks von Modellhelis. Es war schon schwierig genug, einen Modellheli überhaupt in der Luft zu halten. Aber dazu ein sich ständig in wechselnde Richtungen drehendes Heck zu beherrschen war eine Herausforderung an den Piloten. Es war eher eine Kunst, einen Modellheli ohne stabilisiertes Heck zu fliegen, als ein Sport. Erst durch die Verwendung von Kreisel-Stabilisierungssystemen in Modellhelikoptern erschloss sich das Modellheli-Fliegen für eine breite Masse von Modellfliegern.

Ein Heck-Kreiselsystem ist ein Stabilisierungssystem für Helikopter, welches ungewollte Drehbewegungen des Hecks (Hochachse), ausgelöst durch äußere Einflüsse wie Wind oder Lastwechsel, automatisch ausgleicht bzw. ganz oder teilweise korrigiert.
Es gibt auch Mehrachs-Kreisel, die aus drei einzelnen, jeweils 90° zueinander angeorneten Kreiselebenen bestehen, und der Stabilisierung mehrerer Achsen dienen. Ein Flybarless-System für RC-Helikopter ist ein typischer Mehrachs-Kreisel.
Der deutsche Begriff Kreisel basiert auf den ersten Bauformen der Gyro-Sensoren, bei denen ein mechanischer Kreisel, der ähnlich einem Spielzeugkreisel mit hoher Geschwindigkeit rotiert, eingesetzt wurde, um die Bewegungen des Helis um die YAW Achse (Drehung um die Hochachse) zu erfassen. Diese mechanischen Gyro-Systeme sind heute fast vollständig vom Markt verdrängt.
Moderne Kreiselsysteme bedienen sich Sensoren, die auf Halbleitertechnologie basieren.
Im Helikopter-Modellsport werden Kreisel zur Stabilisierung des Hecks von Helikoptern eingesetzt. Ein einfacher Kreisel stabilisiert jeweils nur eine Drehachse.
Kreisel Bauarten
Der Piezokreisel ist ein vollelektronischer Kreisel älterer Bauart, bei dem Piezokristalle anstelle eines mechanischen Kreisels eingesetzt werden. Diese Kristalle geben unter wechselnden mechanischen Belastungen unterschiedlich hohe elektrische Spannungen ab, anhand derer die Stärke und Richtung der Heckdrehung ermittelt und die notwendige Korrektur errechnet wird. Piezokreisel sind leider etwas temperaturempfindlich und daher noch mehr oder minder mit dem Nachteil einer Temperaturdrift behaftet. Hier muss bei Temperaturschwankungen oft manuell nachgetrimmt werden. Ein Vorteil der Piezokreisel ist der günstige Preis, aber dieser wiegt die Nachteile keineswegs auf.
Weitere Bauformen sind die MEMS und SMM Sensoren. Der SMM (Silicon Micro Machine) -Kreisel arbeitet mit einem micromechanischen Sensor. Futaba verwendet für seine SMM-Sensoren die Bezeichnung MEMS (Micro-Electronic-Mechanical System). Diesen Kreiseln wird eine höhere Genauigkeit nachgesagt. Zudem besitzen sie nicht mehr die nachteilige Temperaturdrift der Piezokreisel. Ein Nachteil ist jedoch der noch relativ hohe Preis. MEMS ist ein anderer Ausdruck für SMM und er bedeutet Micro Electro Mechanical System.
Oft werden in Foren die Unterschiede zwischen SMM und MEMS diskutiert. Leider mit wenig fundiertem Hintergrund. SMM oder MEMS als Bezeichnung lassen noch keine Unterscheidung zu. Es kommt definitiv auf die Spezifikationen und Einzelheiten an, die jedoch meistens gar nicht offengelegt werden. Beschleunigungssensoren für militärische Zwecke oder für die Raumfahrt in SMM bzw. MEMS-Technologie werden für Stückpreise verkauft, die teilweise den Wert eines Kleinwagens übersteigen. Das zeigt klar, dass allein durch die Bezeichnung kein Unterschied ableitbar ist.
Moderne MEMS-Bauteile zeichnen sich dadurch aus, dass ein Großteil der gesamten notwendigen Elektronik mit den Sensoren zusammen auf ein und demselben Chip untergebracht ist - also in einem Arbeitsgang hergestellt werden.
Die hier beschriebenen Sensoren werden in gängigen Kreiselsystemen verschiedener Hersteller eingesetzt, aber auch in FBL Systemen finden wir diese Sensoren wieder.
Der wohl bekannteste und sehr weit verbreitete Kreisel ist der GY 401. Ein neueres Modell, praktisch der Nachfolger des GY 401, ist der GY 430. Der für fast alle Helitypen geeignet ist.
Mehrachsen-Stabilisierung in FBL (Flybarless) Systemen
Seit etwa dem Jahr 2010 wurden immer öfter Mehrachsen -Stabilisierungssysteme im Modellbau eingesetzt, bei denen neben der Hochachse (Heckstabilisierung) auch die stabilisierende Funktion der Paddelstange von einer Elektronik realisiert wird. Dieses Systeme werden auch Flybarless-Systeme (FBL), oder RIGID-Systeme genannt. Ein mit einem solchen 3-Achs-Kreisel ausgerüsteter Heli kann ohne Paddelstange fliegen.
Der Einbauort des Kreisels sollte immer so dicht wie möglich am Rotorkopf liegen, da hier der Drehpunkt für alle drei Rotationsachsen des Helikopters liegt. Die Ausrichtung bzw. Einbaurichtung des Kreisels muss entsprechend den Vorgaben des Herstellers erfolgen und es sollten vibrationsarme Einbauorte gewählt werden.
Ein weiterer Punkt für die Wahl des richtigen Einbauortes ist das Risiko von Beschädigungen des Gyro bei einem Crash. Ein gut geschützter Einbauort innerhalb des Chassis ist also immer zu bevorzugen. Gerade bei kleinen Helis bleibt aber meistens nur die Oberseite des Heckgetriebes, oder auch der Boden zwischen den beiden Seitenplatten um einen Gyro aufzukleben.
Zum Befestigen sollten möglichst nur originale Klebe-Pads verwendet werden, da diese auf den Gyro abgestimmt sind. Falls es zu unerklärlichen Reaktionen des Hecks während des Fluges kommt, kann das manchmal an Vibrationen liegen, die sich auf die Gyro-Sensoren übertragen und die Signale verfälschen. Dann muss man entweder den Einbauort verändern, oder andere Klebepads ausprobieren. Im Zweifelsfalle geht hier Probieren über Studieren. Neuere Kreisel mit modernster Technik sind weniger anfällig gegen Vibrationseinflüsse. Höherfrequente Vibrationen, wie sie bei Turbinenantrieben auftreten, können jedoch trotzdem zu Störungen führen. Nicht alle Kreisel sind zum Einbau in Turbinenhelikopter geeignet.
Die Ausrichtung der Kanten des Kreiselgehäuses muss immer exakt parallel zu den Drehachsen des Helikopters erfolgen. Ein Heckkreisel muss zumindest auf der Horizontalen Ebene exakt ausgerichtet sein. Mehrachskreisel erfordern die exakte Ausrichtung auf allen drei Achsen. Näheres findet sich in der Beschreibung des Herstellers. So darf ein GY-401 z. Bsp. nicht seitlich vertikal, sondern immer nur horizontal (z. Bsp. auf dem Heckgetriebe) befestigt werden. Man kann Heckkreisel natürlich auch kopfüber am Heli montieren.
Gyro Betriebsarten/ Betriebsmodi
Es gibt im Prinzip zwei Modi, in denen man Gyro-Sensoren betreiben kann. Das sind zum einen der Normalmodus und zum anderen der Automatik bzw. Heading Hold Modus, auch AVCS (Angular Velocity Control System) genannt. Beim Flugbetrieb wirken Störkräfte wie z. Bsp. Wind und Drehmomentänderungen am Hauptrotor auf den Helikopter. Diese Kräfte wirken dann auf das Heck und bewirken eine Drehbewegung des Hecks. Der Kreisel erkennt ungewünschte Heckbewegungen und korrigiert diese.Normalmodus
Im Normalmodus wirkt der Gyro einer Heckdrehung entgegen. Der Kreisel bremst die Drehbewegung und dadurch stoppt diese irgendwann. Wie stark der Kreisel dabei korrigierend eingreift, ist abhängig von der eingestellten Gyro-Empfindlichkeit. Ein Vorteil des Normalmodus ist, dass der Windfahneneffekt nicht unterdrückt wird. Das Heck richtet sich bei schneller Fahrt durch den Fahrtwind immer nach hinten ausrichtet. So kann man wunderbar schnelle Kurven fliegen und das Heck richtet sich von selbst parallel zur Flugrichtung aus, ohne eigenes Zutun. Das ist jedoch auch schon der einzige Vorteil dieses Modus. Dieser Modus war bis vor einem Jahrzehnt der bevorzugte Modus bei den Piloten großer Scale-Helikopter.
Heading Hold/ AVCS
Im Heading-Hold-Modus wirkt der Heckkreisel einer ungewollten Heckdrehung so lange entgegen, bis das Heck wieder in der Ursprungsposition steht. Bei richtiger Einstellung und Verwendung hochwertiger Komponenten ist der Regelkreis so präzise, dass mit bloßem Auge keine Drehbewegung des Hecks festgestellt werden kann. Die Reaktionsstärke und -geschwindigkeit sind maßgeblich abhängig von der voreingestellten Gyro-Empfindlichkeit und den PID-Werten des Regelkreises, aber auch von der Heckrotordrehzahl, der Qualität des verwendeten Heckservos, und anderen Faktoren. Der Windfahneneffekt kann im HH-Modus nicht ausgenutzt werden. Das ist auch nicht gewünscht. Der Heading Hold Modus ist verpflichtend für 3D-Fliegen mit schnellen Lastwechseln.
Unmittelbar nach dem Einschalten des Kreisels/ Helis wird die Position des Hecks als Nullposition angenommen und das Heckservo auf die Neutralposition gefahren. Hebt man nun ab, wird das Heck präzise in der Position stehen bleiben. Dreht man den Heli jedoch vor dem Abheben manuell auf der Hochachse, dann wird diese "ungewollte" Drehbewegung vom Kreisel als Abweichung vom gespeicherten Nullpunkt registriert und eine Korrektur-Reaktion eingeleitet, die das Heck wieder in die Nullposition bewegen soll. Solange der Heli auf dem Boden steht, kann diese Korrektur jedoch nicht erfolgen, denn der Reibungswiderstand zwischen Heli und Boden ist zu groß. Im Moment des Abhebens ändert sich das jedoch. Dann dreht sich das Heck wie von Geisterhand zurück in die Nullposition. Gleiches passiert, wenn man unmittelbar vor dem Abheben den Hecksteuerknüppel bewegt, und somit ebenfalls eine Reaktion einfordert, welche erst bei Verminderung der Bodenreibung zum Tragen kommt.
Abhilfe schafft hier ganz einfach eine manuelle Korrektur des Anstellwinkels der Heckrotorblätter während des Hochlaufens des Antriebs vor dem Start. Man stellt die Heckrotorblätter mit dem Steuerknüppel zurück in den neutralen Anstellwinkel.
Normalmodus versus Heading Hold
Für beide Modi gilt: Je schwächer die voreingestellte Kreisel-Empfindlichkeit, umso schwächer ist die Gegenreaktion/ Korrektur des Kreisels auf die ungewollte Heckbewegung.
Man kann heute fast uneingeschränkt den Normalmodus vernachlässigen und den Heading-Hold-Modus verwenden. Man gewöhnt sich ganz schnell daran, dass man Heck immer aktiv mitsteuern muss.
Einstellung der Kreisel-Empfindlichkeit (Gyro-Gain)
Es gibt grundsätzlich 2 verschiedene Möglichkeiten die Gyro-Empfindlichkeit einzustellen. Zum einen am Sender und zum anderen am Gyro selbst. Am Gyro findet man dazu zunächst meistens Umschalter, mit deren Hilfe man zwischen Digital- und Analogservos sowie zwischen Heading Hold und Normal Modus umschalten kann. Mittels Mini-Potentiometer, die mit einem kleinen Schraubendreher justiert werden können, stell man die Kreiselempfindlichkeit sowie die Verzögerung (Delay) ein.
Die gleichen Möglichkeiten hat man natürlich auch am Sender. Dort wird ein Potentiometer mit der Empfindlichkeits-Einstellung für den Gyro belegt. Ein extra Anschlusskabel zum Gyro (Standard Heli Senderkanal 5) überträgt die Emfindlichkeits-Voreinstellung zum Gyro.
Die am Markt üblichen Sender unterstützen verschiedene Möglichkeiten der Empfindlichkeits-Einstellung und der Umschaltung zwischen Heading Hold und Normalmodus.
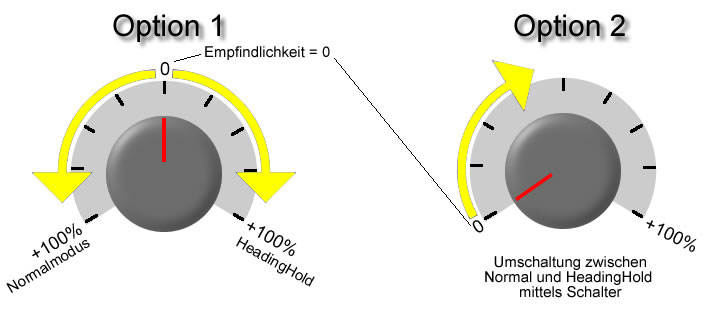
Die einfachste Methode des Umschaltens zwischen Heading Hold und Normalmodus ist die Umschaltung mittels einfachen Kippschalters. Die Kippschalterstellung bestimmt dabei, ob im HH oder im Normalmodus geflogen wird. Die Empfindlichkeit wird bei dieser Methode mittels Potentiometer zwischen 0 und 100% Empfindlichkeit eingestellt. (siehe Bild rechts)
Manche Systeme unterstützen jedoch auch eine viel komfortablere Methode, bei der nur ein Drehpotentiometer alle diese Funktionen erledigt. Das mit dieser Funktion belegte Senderpoti schaltet zwischen HH und Normalmodus um und man stellt gleichzeitig die Empfindlichkeit damit ein. Die Mittelstellung des Poti (eigentlich 50%) ist hier gleich einer 0% Empfindlichkeit des Gyro! In dieser Poti-Stellung darf nicht geflogen werden! Dreht man das Poti nach links, dann erhöht man damit die Empfindlichkeit des Gyro im Normalmodus. Dreht man das Poti ausgehend von der Mittenstellung nach rechts, dann erhöht man die Empfindlichkeit des Gyro im Heading Hold Modus. (siehe Bild links)
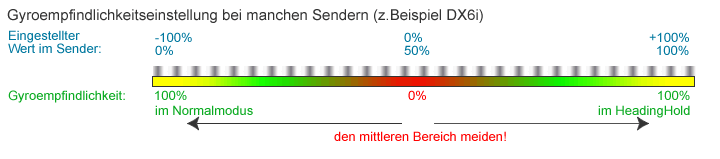
Bei einer DX6i und einigen anderen Modellen kann man mittels Schalter zwischen zwei voreingestellten Gyro-Empfindlichkeiten wählen, auch während des Fluges. ACHTUNG: Eine Einstellung von 50% im Sender entspricht dabei der Gyro-Empfindlichkeit NULL! Stellt man den Wert im Sender auf 0, dann entspricht das 100% Empfindlichkeit im Normalmodus. Stellt man den Wert im Sender auf 100, dann entspricht das 100% Empfindlichkeit im Heading Hold Modus. Bei Einstellung 25 im Sender hat man dann 50% im Normalmodus und die Einstellung 75 entspricht 50% Gyro-Empfindlichkeit im Heading Hold. Siehe auch die Grafik.
Wie das Heck des Helis genau eingestellt wird, kannst du unter Heck einstellen erfahren.
Info
Um das Heck feinfühliger steuern zu können, ist es ratsam eine " Exponentialfunktion " auf die Hecksteuerkurve zu legen. Ich fliege Expo 35-50% bei großen Scale-Modellen sogar noch mehr!